供应
供应
产品详情
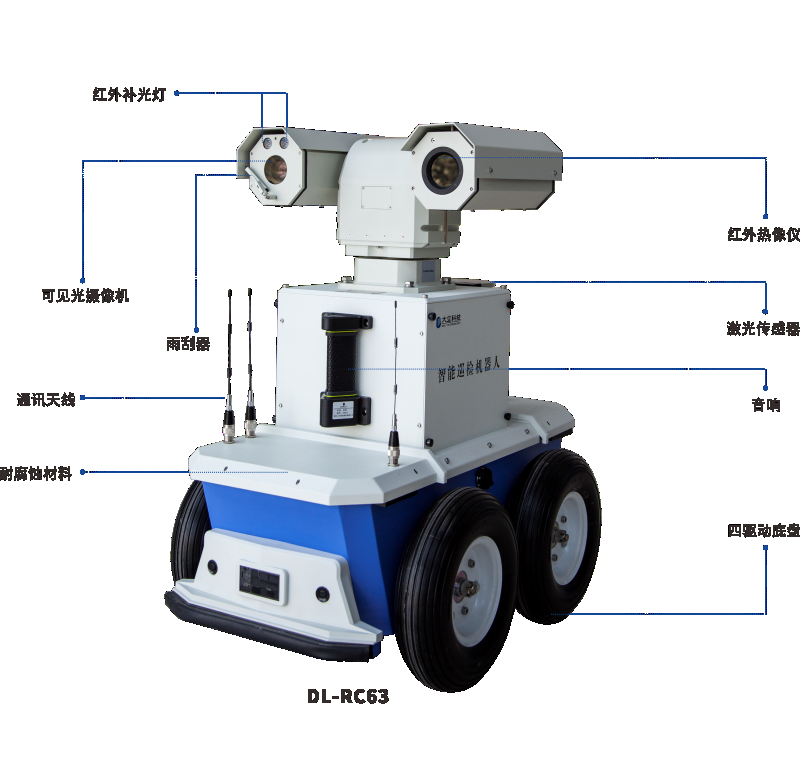
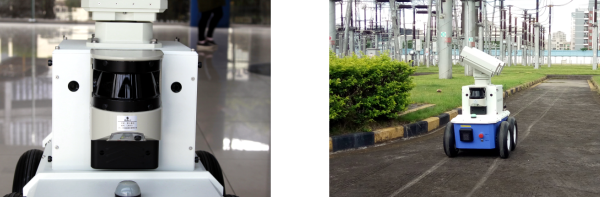
变电站智能巡检机器人集非制冷焦平面探测器、无轨化激光导航定位、红外测温、智能读表、图像识别等核心技术于一体,对输变电设备进行全天候巡检、数据采集、视频监控、温湿度测量、气压监测等,提高输变电站内设备的安全运行。在发生异常紧急情况时,智能巡检机器人可作为移动式监控平台,代替人工及时查明设备故障,降低人员的安全风险。

· 导航定位系统,无轨运行
系统采用激光导航技术,成功的解决了变电站运行稳定性问题,与传统的磁条导航模式相比, 更稳定,更经济。
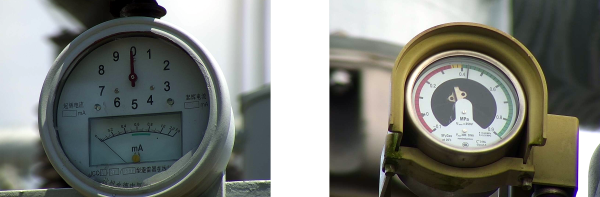
· 仪表读数
能够对有读数的表盘进行数据读取,自动记录和判断,并提出报警, 读数的误差小千5%。
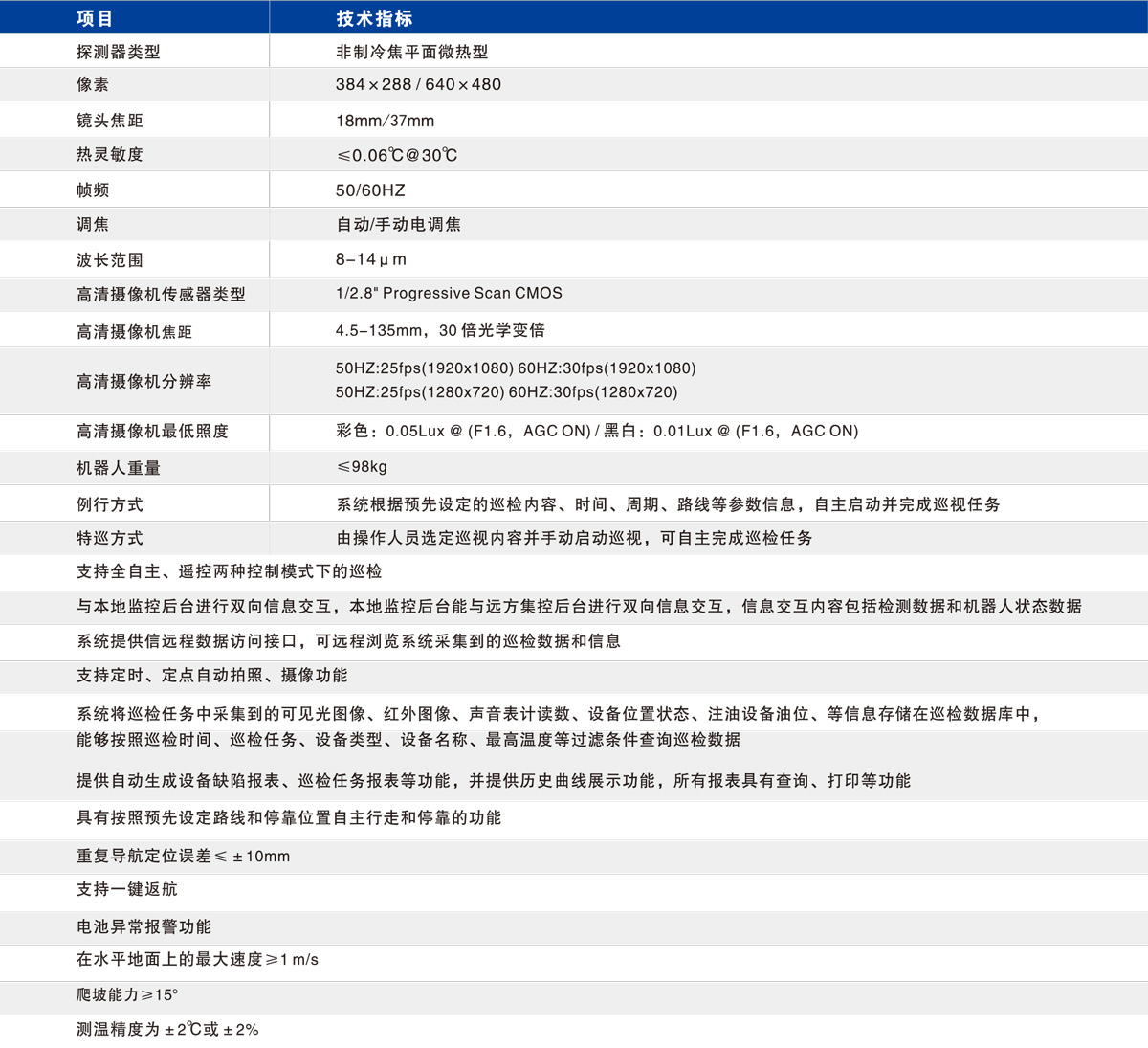
DL-RC63变电站智能巡检机器人
· 智能实时测温
在机器人客户端的红外界面上,能够对实时画面中任意点、任意区域进行实时测温数据分析,减少设置特巡任务的步骤,方便运维人员使用机器人测温,有效提高巡检机器人的实用性。
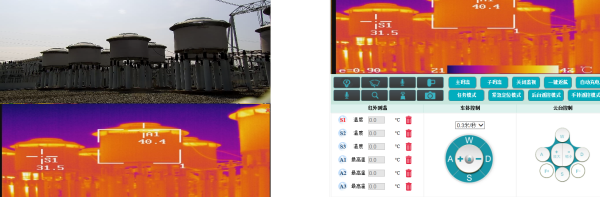
· 多设备多点高效测温
利用红外全景图创新技术,机器人在单一巡检点时,自动识别画面中需要测温的所有设备,精确定位设备后多点准确测温,完成对变电设备360度全景测温的同时,大幅度的提升巡检效率。
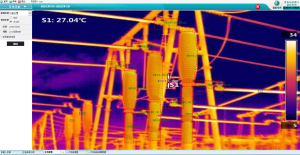
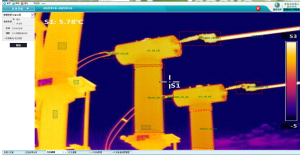
· 轮廓法精确测温
采用全新的红外设备建模技术,精确框取具体的测温部件,使得在多设备的复杂画面中准确定位测温的部位,提高测温的准确性,更清楚、更直观。
· 智能分析软件系统(高效巡检任务设置 / 自动录入生成规范报表等)
自动导航 / 系统巡检 / 智能读表 / 历史数据查询 / 后端控制平台智能化等。

·自动充电
当智能巡检车处于低电量时,可自动行驶到充电房进行充电。一次充电可连续工作9小时。

· 远程控制系统
能正确接收本地监控和远程集控后台的控制指令,实现云台转动、车体运动、自动充电和设备检测等功能,井正确反馈状态信息。

· 识别、报警智能化
新增刀闸分合状态的报警功能,当前刀闸分合状态与上一次巡检的状态不一致时,后台智能报警。支持对所有设备报警阈值的导入与导出功能 。

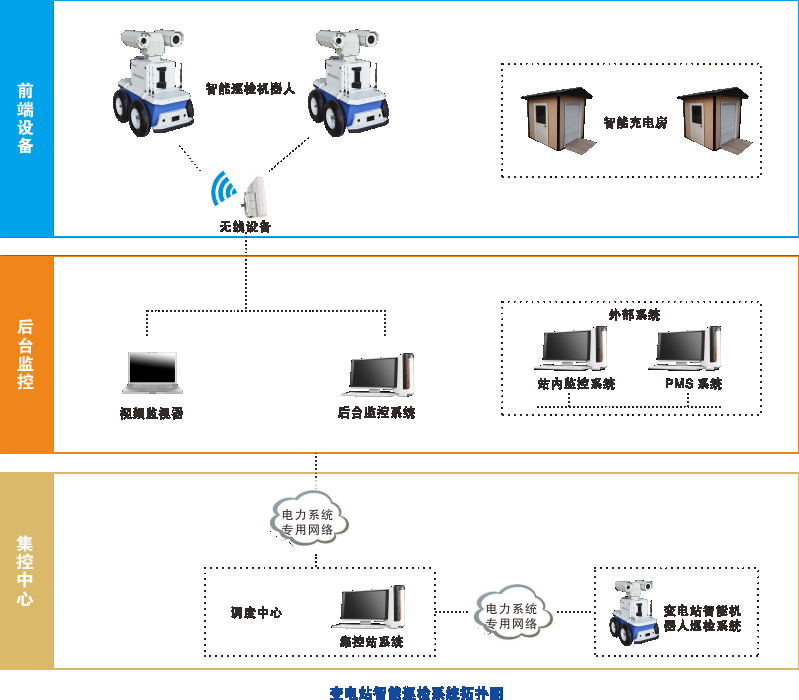
变电站智能巡检系统整体分为三层,分别为前端设备、传输部分和后端控制中心。
前端设备
智能巡检机器人 / 充电房 / 固定监测点等
传输部分
由网络交换机、无线网桥等设备组成,负责建立基站层与智能终端层的网络通道
后端部分
由机器人后台、硬盘录像机、硬件防火墙及智能控制与分析软件系统组成
一、巡检功能
1、系统支持全自主和遥控巡检模式。
1)全自主模式包括例行和特巡两种方式。例行方式下,系统根据预先设定的巡检内容、时间、周期、路线等参数信息,
自主启动并完成xun视任务;特巡方式由操作人员选定xun视内容并手动启动xun视,机器人可自主完成巡检任务。
2)遥控巡检模式由操作人员在本地监控后台上使用软件手动遥控机器人,完成xun视工作。
2、巡检内容包括:
1)设备和接头的温度;
2)断路器、隔离开关的分合状态;
3)变压器、CT等充油设备的油位计指示;
4)SF6气体压力等表计指示;
5)避雷器泄漏电流指示;
6)变压器、电抗器等噪声;
3、具备巡检路线规划功能,通过本地监控后台在巡检过程中实时修改巡检点的功能;
4、系统提供二维电子地图或三维电子地图功能,实时显示机器人在电子地图上的位置。
二、检测功能
机器人配备可见光摄像机、红外热成像仪和声音采集等检测设备,并能将所采集的视频和声音上传至本地监控后台。标配可见光摄像机、红外热成像仪和声音采集,可灵活选配超声、局放等检测设备。
三、系统互联
1、提供与变电站综自系统、生产管理系统、消防系统、安防系统、视频系统等接口;
2、与站内监控系统协同联动,在设备操作时能实时显示被操作设备的图像信息;
3、与顺序控制进行配合,通过图像自动识别系统判断断路器、隔离开关和接地开关的分合状态;
4、与消防安防系统联动,发生报警时能紧急赶到报警位置。
四、信息交换与通信网络功能
1、机器人与本地监控后台进行双向信息交互,本地监控后台与远程集控后台进行双向信息交互,信息交互内容包括检测数据和机器人状态数据;
2、网络拓扑符合实际工程需求,采用点对点或星型结构;
3、系统具有通信告警功能,在通信中断、接收的报文内容异常等情况下,上送告警信息到本地监控后台,监控后台可通过特定通讯协议上传到其 他系统;
4、系统满足变电站有关信息安全的标准或文件要求。
五、机器人自检
1、机器人具有自检功能,包括(电源、驱动、通信和检测设备等)部件的工作状态,发生异常时能就在本地监控后台指示,并能上传故障信息。
2、机器人上具有电源指示灯,故障指示灯,充电指示灯,网络指示灯,运行警示灯。
六、报警功能
具有设备检测数据的分析报警功能。报警发生时,本地监控后台立即发出报警信息,并伴有声光提示,并能人工退出/恢复;报警信号能远传。
七、音视频远传
具有实时图像远传和双向语音传输功能,可实现就地或远程视频xun视和作业指导功能。
八、噪声识别
能够对设备运行噪声进行采集、远传等功能。
九、集控模式
远程集控后台支持集控模式,实现多个变电站机器人巡检系统的集控管理。
十、对时功能
系统具有对时功能,本地监控后台可采用网络对时、SNTP或GPS、北斗对时等方式,对时周期和精度符合工程实际的需求。
十一、接地功能
机器人室有明显的接地点并与变电站主地网有效连接。
十二、微气象数据采集
本地监控后台具有环境温度、湿度和风速采集功能。
浙江大立科技股份有限公司开发的WL-D系列双臂机器人升降机是用于变电站智能巡检机器人上、下车的装置。平台在升起、降下运行过程中是平稳、可靠、安全的,可轻松的举起350Kg以内的重物。
WL-D系列机器人升降机为全电控液压系统,可实现展开、收起以及上下动作。升降机动作由标准手持单元控制,可线控操作或选择遥控操作。同时配有手动操作装置。
该产品主要铰接点采用自润滑轴承,易于保养。精致、紧凑的设计和强劲的全钢架结构确保了大的车内空间,给您提供可靠的无障碍环境。

网zhan数据仅供参考,如遇变更或调整恕不另行通知,以实际产品为准。
 摘要:远距离双目制冷型红外热成
[详细]
摘要:远距离双目制冷型红外热成
[详细]
 摘要:状态监控和热点探测红外热
[详细]
摘要:状态监控和热点探测红外热
[详细]
 摘要:LT3-P/LT7-P是一款经过全新
[详细]
摘要:LT3-P/LT7-P是一款经过全新
[详细]
 摘要:T1手持式红外热像仪160*120
[详细]
摘要:T1手持式红外热像仪160*120
[详细]
 摘要:红外气体检漏测温成像仪GF7
[详细]
摘要:红外气体检漏测温成像仪GF7
[详细]
 摘要:金属封装384×288/像元间距1
[详细]
摘要:金属封装384×288/像元间距1
[详细]
 摘要:金属封装384×288/像元间距2
[详细]
摘要:金属封装384×288/像元间距2
[详细]
 摘要:DM66系列是640×480像素非制
[详细]
摘要:DM66系列是640×480像素非制
[详细]
通道闸 距离传感器 冷光灯 连体防护服 路障机 水系灭火器 4kg干粉灭火器 巡更棒 食堂售饭机 拉力传感器 信号接收器 氧气呼吸器 管道支架 正压氧气呼吸器 管支架 甲级防火门 室内音柱 视频放大器 铜包钢接地棒 停车设备 防爆柜 放热焊接 车载电源 伸缩接头 自动感应门 食堂打卡机 张力传感器 防盗网价格 饭堂售饭机 消防水炮 消防水泡 辐射防护服 高清矩阵 长管呼吸器 二合一防雷器 视频监控系统 话筒报价 监控主机 监控机 智能水表 强光手电筒 交通警示牌 旋转接头 可视门铃 防静电大褂 可视门铃